
{kind=link}
Biography
Hi! I am Jinshan Liu (刘锦山), a junior undergraduate student majoring in Computer Science at Xi’an Jiaotong University (XJTU).
My research interests mainly focus on: Multimodal Large Language Model, AIGC, Computer Vision.
✨ I’m always open to all kinds of cooperation and discussion. You can contact me via email or WeChat: ShanHe0416.
📖 Education

Xi'an Jiaotong University (XJTU), China
2023.09 - 2027.07 (expected)
B.Eng. in Computer Science and Technology
• Ranking: 1/193
• GPA: 93.66 / 100
• CET-6: 639
🔥 News
- 2026.03: 🎉 FedShift is accepted by ICLR 2026 Workshop as oral presentation. Congratulations to all co-authors. See you in Rio de Janeiro, Brazil.
📝 Publications | Preprints

LinCa: Accelerating Diffusion Models via Learnable Decomposed Feature Caching
JinShan Liu *, Haoran Qin *, Xiaobing Tu, Jiacheng Liu, Jiahui Hu, Zhengan Yan, Yukun Xie, Kerui Shen, Jinkui Ren, Yuqi Lin, Xiantao Zhang, Linfeng Zhang †
TL;DR: We propose LinCa, a learnable feature caching framework for diffusion model acceleration. By decomposing cached features via invertible networks and applying differentiated predictors per component, LinCa achieves near-lossless quality at high speedup ratios on FLUX, Qwen-Image, and HunyuanVideo
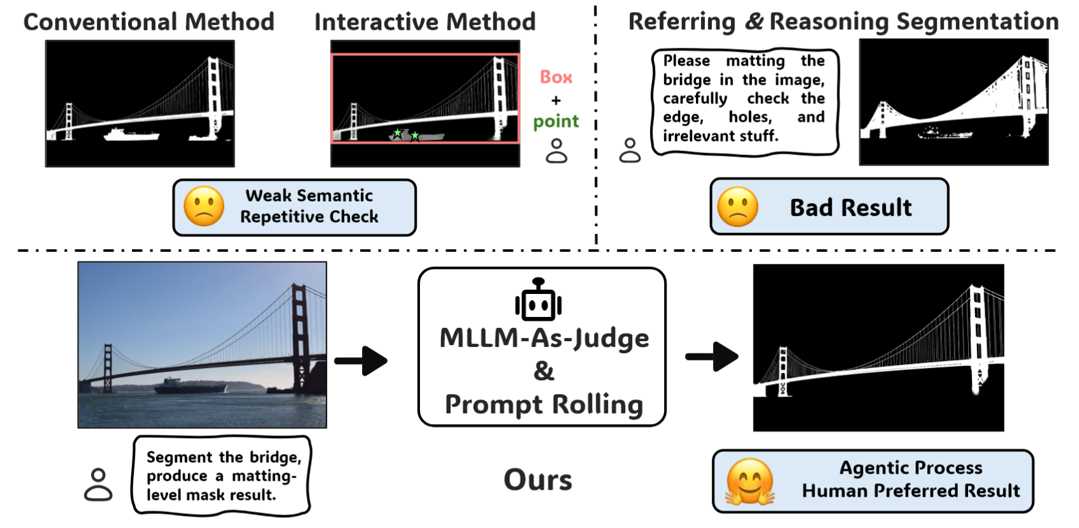
Kiroshi: An Agentic Perception System for High-Accuracy Image Parsing
Haipeng Zhou *, JinShan Liu *, He Zhang, Xuequan Lu, Jun Ma, Lei Zhu †
TL;DR: We propose Kiroshi, an agentic perception system for high-accuracy image matting and segmentation. By training an Action Model with iterative refinement and MLLM post-training via within-context preference pairs, Kiroshi achieves fully automatic, state-of-the-art fine-grained image parsing.
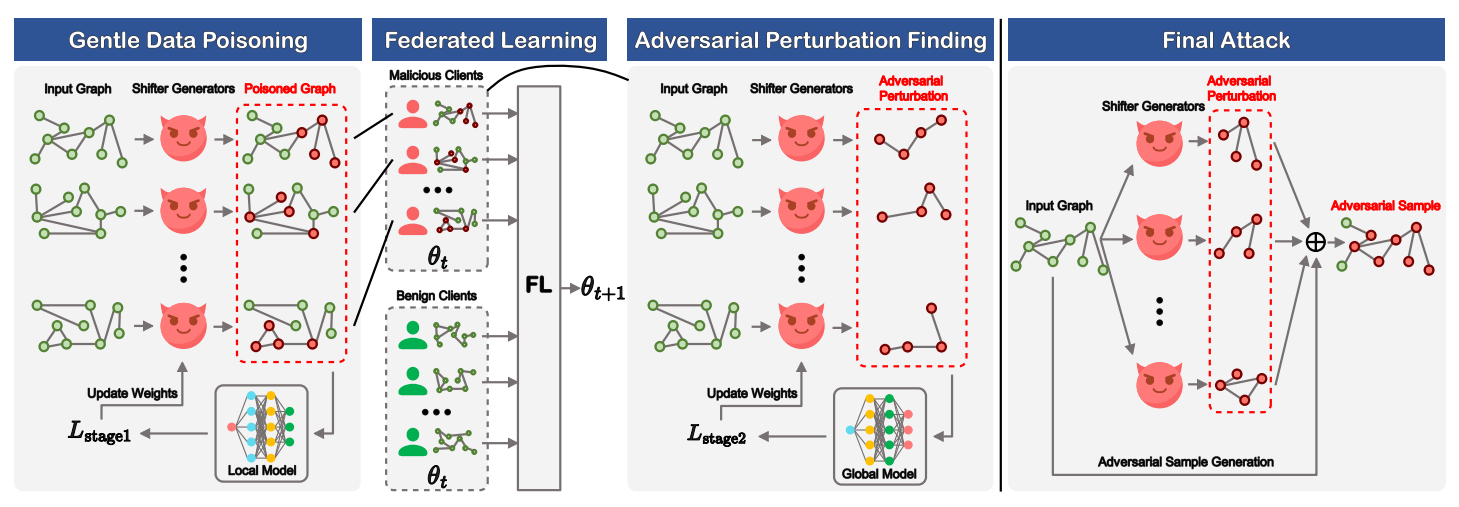
Hide and Find: A Distributed Adversarial Attack on Federated Graph Learning
JinShan Liu *, Ken Li *, Jiazhe Wei, Bin Shi †, Bo Dong
TL;DR: We propose FedShift, a two-stage distributed backdoor attack on Federated Graph Learning that hides a learnable shifter during training and finds adversarial perturbations post-training, achieving state-of-the-art attack success while evading defenses with 90%+ reduced cost.
* Equal contribution. † Corresponding author.
🔬 Research & Intern Experience

EPIClab, Shanghai Jiaotong University
2025.10 - present, Research Assistant, Shanghai, China
Supervised by Prof. Linfeng Zhang

ROASlab, The Hong Kong University of Science and Technology (Guangzhou)
2025.08 - present, Research Assistant, Guangzhou, China
Supervised by Prof. Lei Zhu
BDKElab, Xi'an Jiaotong University
2025.03 - 2025.07, Research Assistant, Xi'an, China
Supervised by Prof. Bin Shi
🔧 Engineering Experience

Multi-modal Service Robot Based on ROS Architecture
We built a multi-modal fully automatic home service robot powered by YOLOv8, MediaPipe, and InsightFace over ROS communication, achieving precise vision capabilities (facial recognition, object detection, action recognition, ACC > 95%) and interaction abilities (voice interaction, autonomous navigation, object grasping, near-zero failure rate).
🥇 Honors and Awards (Selected)
- 2025 National Scholarship, Ministry of Education of China
- 2025 National First Prize 🏆, RoboCup China Robot Competition
- 2025 Meritorious Winner 🏆, Mathematical Contest In Modeling (MCM/ICM)
- 2024 National Scholarship, Ministry of Education of China
- 2024 National First Prize 🏆, RoboCup China Robot Competition
📋 Service
- Reviewer: AAAI 2026, ICLR 2026, ECCV 2026
Latest updated in Mar. 2026
© Jinshan Liu